


Ich wollte mich schon länger mit dem Thema Photogrammetrie beschäftigen. Jetzt habe ich endlich die Zeit gefunden in das Thema einzusteigen und möchte mein Wissen hier mit euch teilen. Gestartet habe ich mit dem Bau einer Drehscheibe und Kamerasystem um die notwendigen Bilder des Objektes welches ich später gerne als ein 3D Modell habe möchte aufzeichnen zu können. Wichtig ist zu verstehen, dass die Photogrammetrie eines von mehreren berührungslosen Messverfahren ist welches sich sehr gut eignet Objekte als einen digitalen Zwilling abzubilden für z. B. die industriellen Qualitätssicherung, zur Erzeugung von Synthetischen Daten oder auch zur Bauteilentwicklung und deren Verifizierung. Hat man einmal verstanden wie Photogrammetrie funktioniert und den Prozess im Griff bieten sich für diese Technik viele Einsatzmöglichkeiten.
Jetzt möchte ich erst einmal meinen Aufbau vorstellen den ich nutze um Bilder automatisiert aufzeichnen zu können. Denn dieser Teil ist recht Zeitaufwändig und nicht wirklich spannend. Daher lohnt es sich diesen Schritt der Bildaufzeichnung mit dem es immer zuerst losgeht so gut wie möglich zu automatisieren. Ich gehe für mein Setup davon aus, dass Objekte mit einem Volumen von ca. 50cm x 50cm + 50cm digitalisiert werden sollen. Das Gewicht würde ich mal auf ca. 8kg beschränken die meine Lösung noch gerade so bewältigen kann. Natürlich können auch größere Systeme gebaut werden mit dem gleichen Funktionsprinzip.
Hier einmal ein Bild des Aufbaues wie ich diesen aktuell nutze bestehend aus Beleuchtung, Raspberry Pi HQ Kamera und der automatischen Drehscheibe bzw. Drehteller. Die Drehung und dazugehörige Bildaufzeichnung wird von einem kleinen Python Programm gesteuert. So kann ich innerhalb von ca. 2 Minuten 51 Bilder des Objektes bei einer 360 Grad Umdrehung aufzeichnen.
Automatischer Drehteller – die Komponenten
Die notwendigen technischen Komponenten für den automatisierten Drehteller besteht im Wesentlichen aus einem Raspberry Pi, einem Schrittmotor, 3D gedruckten Bauteilen und einem Motortreiber für den Schrittmotor. Jetzt bin ich ein Freund günstiger Aufbauten so erfolgt die Stromversorgung mit einem alten ATX Netzteil vom nahe gelegenen Wertstoffhof. Damit ich die Raspberry Pi Kamera sehr flexible einsetzen kann verwende ich noch zwei CSI auf HDMI Adapter. So kann ich das Kamerasignal der Raspberry Pi Kamera über ein HDMI Kabel führen und habe so eine leicht anzuschließende Lösung im Fall des Transportes des Systems sowie kann ich das HDMI Kabel in seiner Länge beliebig wählen.
Das folgende Bild zeigt den fertigen Aufbau mit all den in der nachfolgenden Tabelle aufgeführten und hier verbauten Komponenten.

photogrammetry automatic turntable for precise picture recording setup
Im jetzt folgenden Abschnitt liste ich die von mir verbauten Komponenten auf. Das sind dann doch einige geworden aber so habt ihr eine vollständige Übersicht.
Liste der verbauten Komponenten
Die Liste der Komponenten ist soweit vollständig und kann natürlich individuell gestaltet werden je nach Erfahrung des Einzelnen. Sie soll helfen schnell einen Überblick zu bekommen was alles in meinem Setup verbaut wurde und zum Einsatz gekommen ist.
Hinweis: Bei den hier eingefügten Links handelt es sich um Affiliate Links auf den Web-Shop von Amazon.
Ich hoffe das die Amazon Liste hier mit den passenden Bildern gut lesbar ist und schnell einen Überblick auch bei den aktuellen Preisen gibt. Sicher kann auf z. B. ebay-kleinanzeigen oder über andere Marktplätze das ein oder andere Produkt billiger gefunden werden. Aber für mich hier als Autor ist die Einbindung des Amazon-Webshops mit seiner API sehr einfach und daher stütze ich mich darauf.
- Raspberry Pi 3 Model B+ 10%
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - Raspberry Pi Kamera HQ
") (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - Raspberry Pi Kamera HQ Objektiv
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - Micro SD Karte 32GB (hier bitte eine schnelle kaufen und nicht sparen)
") (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - CSI zu HDMI Adapter
") (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - Calumet Studio FlexArm (Calumet web-shop)
- Calumet Studio Clamp Befestigungsklammer (Calumet web-shop)
- micro USB Kabel (Stromversorgung Raspberry Pi)
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - HDMI Kabel ca. 2m länge 19%
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - ATX Anschlussplatine / Board
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - Ein / Aus Schalter
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - Lazy Susan Drehscheibenkugellager
, 4 Stück") (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - Schrittmotor 12V / 2A
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - Schrittmotor Motortreiber
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - GT2 Riemen 460mm – 230 Zähne
") (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - Jumper-Kabel
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - GPIO Expander (optional)
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - 3D Druck STL Dateien (audiomatica.com)
- Lochstreifen Platine (optional)
 (* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm)
(* = Affiliate-Link / Bildquelle: Amazon-Partnerprogramm) - Multiplex-Holzleisten vom Baumarkt zugeschnitten (12 cm x 1,5 cm x 80 cm)
- Holzschrauben 3,5mm x 30mm
Verwendete Werkzeuge
- Stichsäge
- Standborhmaschine mit div. Holzbohrern
- 3D Drucker
- Lötkolben mit Zubehör
Der von mir entworfene und fertig aufgebaute Drehteller für mein Photogrammetrie Projekt sieht wie auf dem nachfolgenden Bild gezeigt aus.

photogrammetry automatic turntable for precise picture recording turntable
Im jetzt folgenden Abschnitt werde ich im Detail auf den Aufbau eingehen und wie ich alles zusammengesetzt habe und warum.
Automatischer Drehteller – der Aufbau
Jetzt werde ich Dich Schritt für Schritt durch den Aufbau des automatischen Drehtellers führen. Losgegangen ist es zunächst einmal damit, dass ich mir alle notwendigen 3D Bauteile ausgedruckt habe und sämtliche Elektronik bestellt habe. Als alle vorhanden war also auch das Holz und eine große Auswahl an Holzschrauben und Gewindeschrauben ging es dann los. Dann folgte die Verkabelung.
Ein ganz großes Dankeschön geht an die Web-Seite audiomatica.com für die tolle Arbeit eines Drehtellers mit Schrittmotor. Hier konnte ich die 3D Modelle wiederverwenden für mein Projekt.
Automatischer Drehteller – Schrittmotor und Drehscheibenkugellager
Wichtig war hier das Kugellager das den Drehteller hält und überhaupt drehbar macht. Die Position für das Drehscheibenkugellager habe ich zusammen mit dem großen Zahnrad, GT2 Riemen und dem Schrittmotor auf dem Multiplexbrett festgelegt. Anschließend habe ich das Drehscheibenkugellager auf dem Holz festgeschraubt und das Zahnrad samt Drehtellerhalterung am Drehscheibenkugellager verschraubt. Für die Befestigung des Schrittmotors habe ich in das Multiplexbrett erst einmal eine Nut gesägt. So habe ich die Möglichkeit den Schrittmotor etwas bewegen zu können und über diese Bewegung den GT2 Riemen zu spannen. Alles sollte sich recht leicht mit der Hand drehen lassen. Eventuell werde ich noch einen Riemenspanner verbauen aber bis jetzt funktioniert der Aufbau so sehr gut und es kommt nicht zum durchrutschen des GT2 Riemens.
In dem folgenden Bild ist die Nut gut zu sehen in der der Schrittmotor sitzt umso den Riemen individuell spannen zu können.
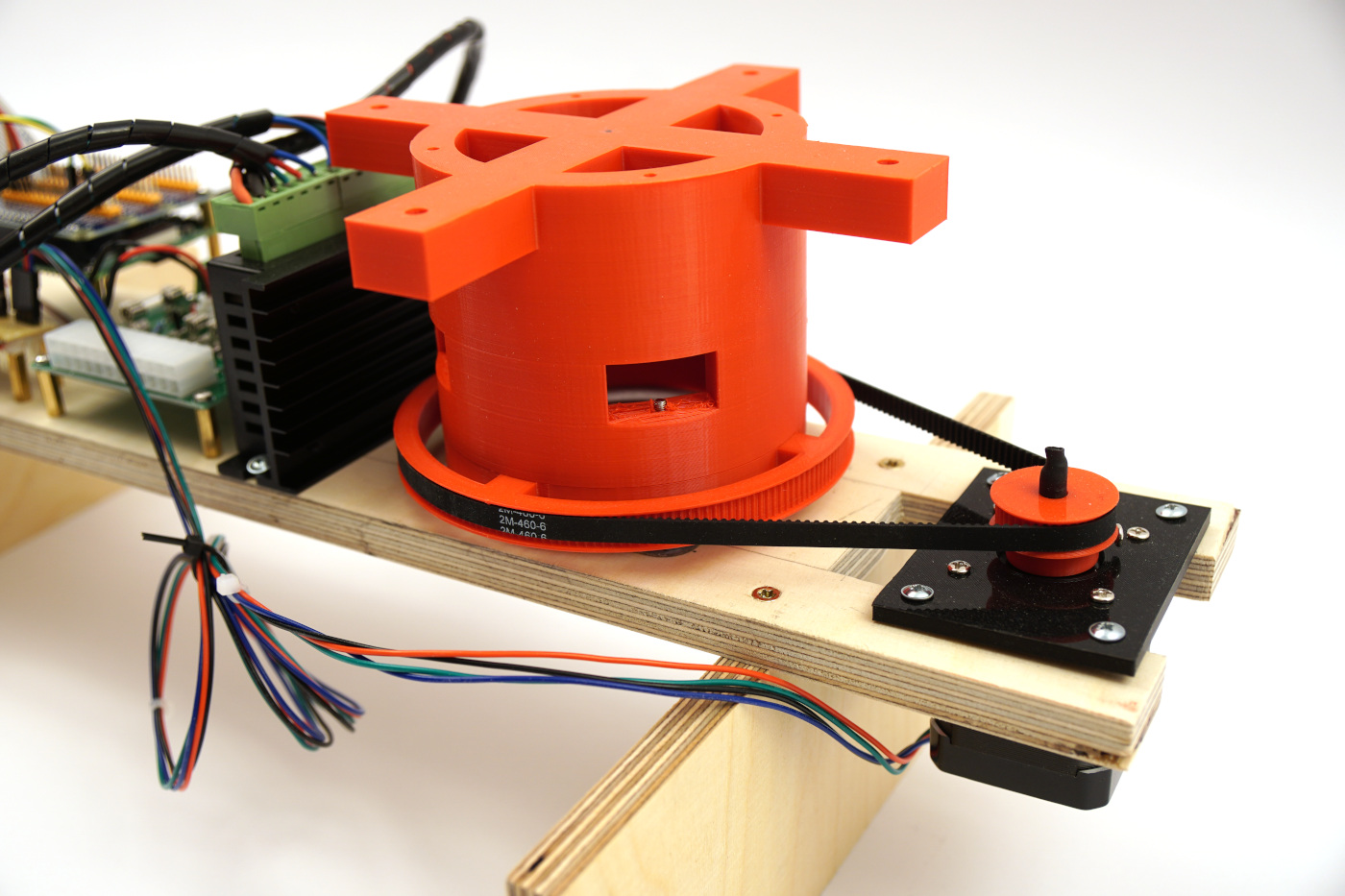
photogrammetry automatic turntable for precise picture recording stepper motor
Nach dem ich jetzt die Haltevorrichtung für den Drehteller angebracht habe und den Schrittmotor wurden die beiden Holzleisten als Füße links und rechts unterhalb dem Brett welches als Träger für den Drehteller und die Elektronik fungiert von mir befestigt.
Automatischer Drehteller – Elektronik befestigen
Bei der Befestigung der Elektronik ist es wichtig, dass der Drehteller wenn sich dieser dreht nicht an z. B. Schrittmotortreiber anstößt. Also hier etwas darauf achten, dass genügend Abstand zum Drehteller eingehalten wird. Auch wird der Drehteller an der Halterung die auf dem Drehscheibenkugellager sitzt selber fest geschraubt. Diese schrauben können je nach Länge etwas nach unten heraus schauen.
Ich habe meine Komponenten so befestigt das ich kurze Wege für die Kabel habe. So folgt direkt neben dem Drehteller links der Schrittmotortreiber. Dieser ist das höchste Bauteil aber passt sehr gut unter den Drehteller. Denn ich habe 3D Modell für die Halterung des Tellers so entworfen das der Schrittmotor mit etwas Abstand darunter passt.
Da ich ein Freund des Wiederverwenden und Gelsparens bin habe ich mich für den Betrieb des Aufbaues für ein altes ATX Netzteil vom Wertstoffhof entschieden. Damit ich dieses komfortabel anschließen kann habe ich mir eine Adapterplatine gekauft. Diese habe ich links neben dem Schrittmotortreiber befestigt. Sie liefert mit die notwendigen 12V für den Schrittmotor und die benötigten 5V für den Raspberry Pi.
Der Raspberry Pi mit dem GPIO Erweiterungsboard und CSI zu HDMI Adapter folgenden ganz links so dass ich gut an die Anschlüsse des Raspberry Pis heran komme wie USB, Netzwerk und HDMI Ausgang.
Die kleine Platine für die Steuersignale an den Schrittmotortreiber sowie der Anschluss für den Schrittmotor selber ist Optional. Ich habe diese nur gebaut damit alles etwas aufgeräumter ist und ich mir hoffentlich so Wackelkontakte bei den Jumperkabeln ersparen kann.
Im folgenden Bild sind noch einmal alle Komponenten gut zu sehen.
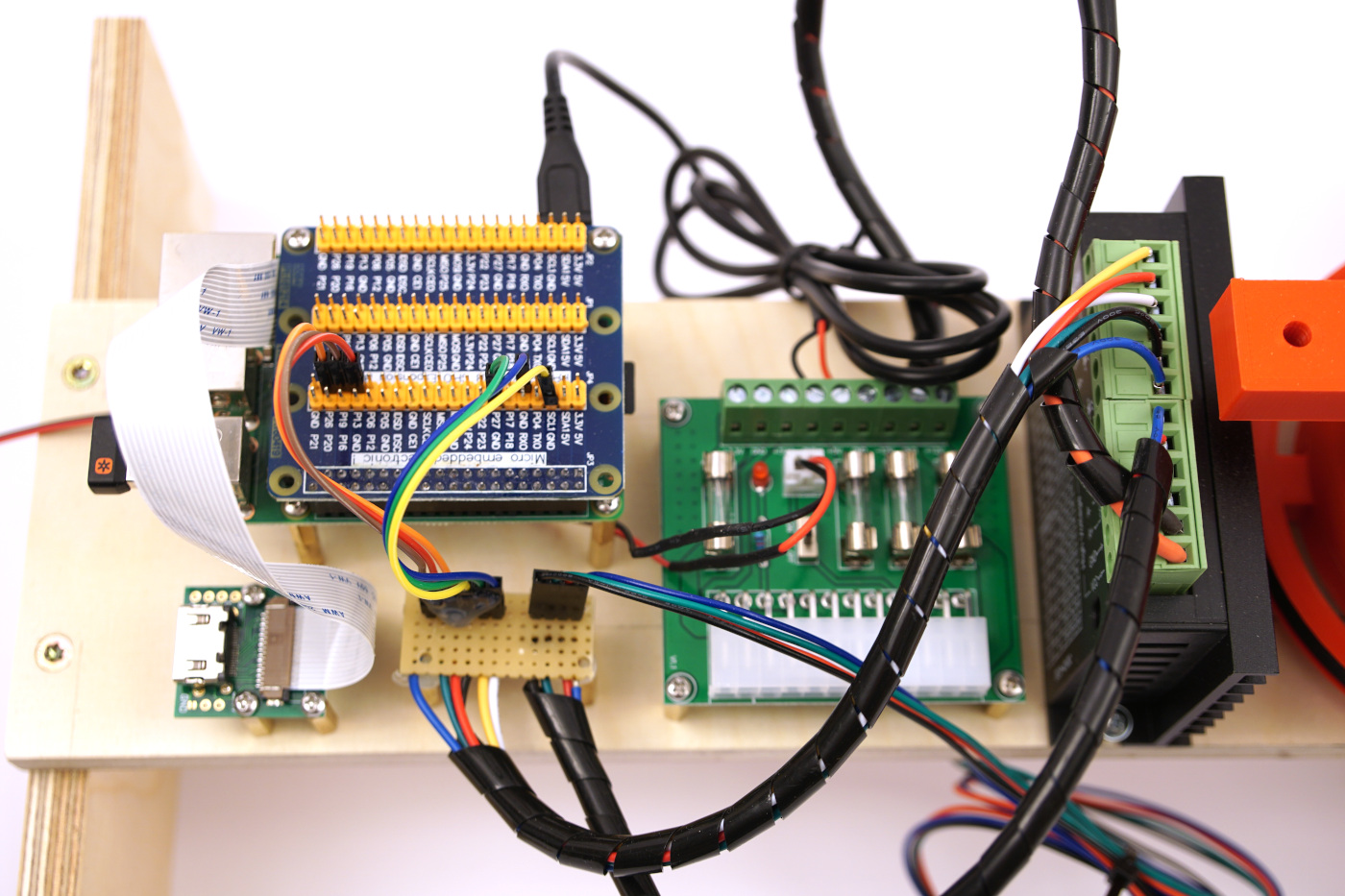
photogrammetry automatic turntable for precise picture recording electronics
Automatischer Drehteller – Verkabelung der Elektronik
Die Verkabelung der Elektronik ist nicht schwer und geht recht fix. Zuerst sollte die Stromversorgung mit 5V für den Raspberry Pi hergestellt werden um einmal das ATX Adapterboard testen zu können, das ATX Netzteil vom Wertstoffhof und ob der Raspberry Pi so startet. Wenn das klappt wird die 12V Stromversorgung mit Motortreiber umgesetzt damit dieser den Schrittmotor antreiben kann.
Damit der Motortreiber vom Raspberry Pi aus gesteuert werden kann muss hier die Verkabelung auch vorgenommen werden. Ich beschreibe jetzt die Verkabelung ohne der kleinen selbst gebauten Platine dazwischen. Denn diese leitet die Kabel lediglich 1:1 durch. Für die Verkabelung des Motortreibers mit dem Raspberry Pi werden jetzt sechs Female-to-Male Jumperkabel benötigt.
| Motortreiber Pin |
Raspberry Pi Pins |
| ENA- | GND |
| DIR- | GND |
| PUL- | GND |
| ENA+ | PIN 37 |
| DIR+ | PIN 33 |
| PUL+ | Pin 35 |
Das nachfolgende Bild soll helfen die Verkabelung zwischen Raspberry Pi und dem Motortreiber einfacher zu verstehen und um vor allem Fehler zu vermeiden.

photogrammetry automatic turntable for precise picture recording wires
Der Schrittmotor wird auch am Motortreiber angeschlossen. Hier können vier Male-to-Male Jumperkabel genommen werden. Wichtig ist hier auf die Anschlussbeschreibung des Farbcodes des Schrittmotors zu achten. Die vier Phasen müssen entsprechend ihren Farben in B-/B+ und A-/A+ angeschlossen werden. Macht man hier einen Fehler läuft der Schrittmotor nicht ordentlich und man muss den Fehler suchen.
Jetzt sind soweit alle Kabel gesetzt und des CSI zu HDMI Adapter muss noch am CSI Steckplatz des Raspberry Pis mit einem CSI-Kabel angeschlossen werden. Wenn dann noch auf der Seite der Kamera einer der beiden CSI zu HDMI Adapter angebracht wurde ist die Verkabelung soweit abgeschlossen.
Fazit
Ich habe mehrere Versuche und Tage gebraucht den Aufbau soweit fertig zu stellen da ich doch einige 3D Ausdrucke und Optimierungen vornehmen musste. Aber jetzt bin ich mit dem Aufbau soweit sehr zufrieden und die automatische Bildaufzeichnung spart mir sehr viel Zeit bzw. erspart mit die langweilige Aufbaue den Drehteller von Hand drehen zu müssen. Ich finde die Ausgaben waren es wert und der Bau dieser Lösung hat mir auch sehr viel Spaß gemacht. Jetzt im nächsten Kapitel geht es um die Programmierung der Anwendung zur Steuerung des Schrittmotors und der Kamera.
Hier ein kleines Video das eines meiner ersten Ergebnisse zeigt. Dazu habe ich die Demo Version von Agisoft Metashape verwendet.

Photogrammetrie Beitragsserie:
Die nachfolgenden Artikel beschreiben den Bau einer eigenen Photogrammmetrie-Lösung.
Photogrammetrie – Bau eines automatisierten Drehtellers für die BildaufzeichnungPhotogrammetrie – Programmierung des automatisierten Drehtellers für die Bildaufzeichnung








{kind=link}
Recent Comments